


Robot de limpieza de paneles solares totalmente automatizado
Descripción del Producto
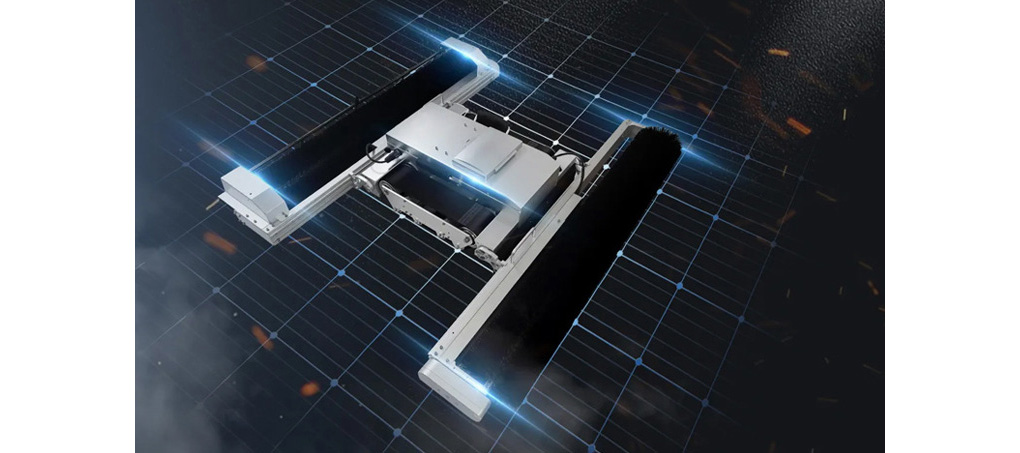
El exclusivo diseño del sensor de visión oculto antideslumbrante garantiza que el robot pueda adquirir información de posicionamiento con precisión incluso en entornos de mucha contaminación o luz brillante, lo que permite un posicionamiento de alta precisión de los módulos fotovoltaicos.
Sin ninguna modificación del campo, el sistema de visión artificial del robot puede lograr una navegación con posicionamiento milimétrico sobre la superficie del módulo. Sin supervisión humana, puede detectar, planificar y tomar decisiones de forma autónoma para una automatización perfecta de la limpieza.
El robot de limpieza fotovoltaico portátil tiene 6 características principales:
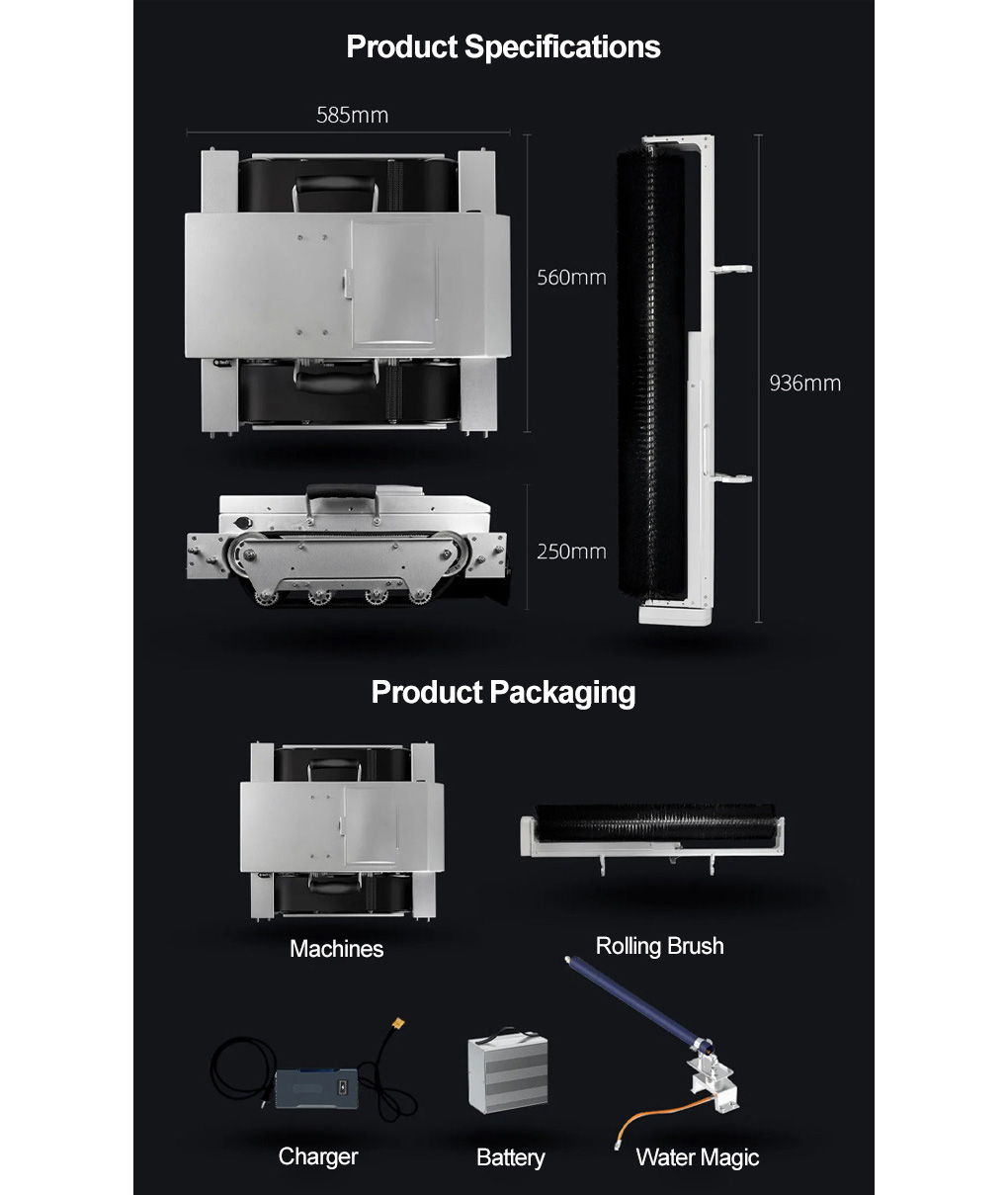
1、La batería se puede reemplazar y la vida útil de la batería no tiene preocupaciones.
Un solo robot, alimentado por dos baterías de litio, permite que toda la máquina funcione ininterrumpidamente durante dos horas. Su diseño de desmontaje rápido tipo bala prolonga fácilmente su autonomía.
2、Limpieza nocturna Retorno automático de baja potencia
El robot de limpieza puede realizar operaciones de limpieza de forma segura durante la noche y regresar al vuelo con bajo consumo de energía, posicionándose de forma autónoma. El día no afecta la generación de energía de la central, lo que mejora significativamente la eficiencia energética del usuario.
3、Panel ligero y portátil, 0 carga
El uso innovador de materiales aeroespaciales y el diseño ligero de toda la máquina evitan daños por pisoteo en los paneles fotovoltaicos durante el proceso de limpieza. Su estructura ligera reduce la carga de manejo para los usuarios, permitiendo que una sola persona despliegue y gestione rápidamente docenas de máquinas simultáneamente, ahorrando costos de limpieza y mejorando eficazmente la eficiencia del trabajo.

4、Una tecla inicia la rotación Ruta de planificación inteligente
El robot inteligente se activa con solo pulsar un botón. Su modo de limpieza rotatorio especial, equipado con sensores integrados, permite al robot detectar el borde de la superficie, ajustar automáticamente el ángulo y calcular de forma independiente la ruta de limpieza óptima y eficaz, con una cobertura completa sin errores.
5. Marcha escalonada por adsorción para adaptarse a una variedad de superficies oblicuas.
El robot se adsorbe estrechamente a la superficie de los paneles fotovoltaicos a través de ventosas móviles, y la distribución escalonada de ventosas auxiliares le permite caminar de manera más estable en pendientes suaves de 0 a 45°, adaptándose a diversos entornos operativos complejos.
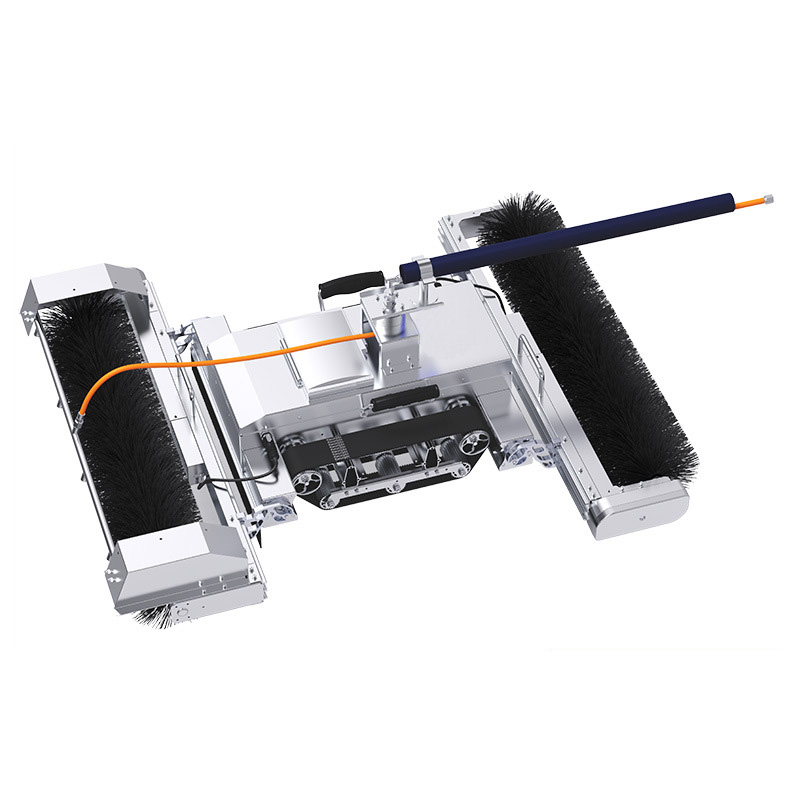
6、Limpieza nano sin agua con turbocompresor más excelente
Una sola unidad de limpieza está equipada con dos cepillos giratorios de nanofibras que giran en direcciones opuestas. Estos recogen las partículas de polvo adsorbidas en la superficie y las recogen para ser aspiradas instantáneamente al depósito de polvo gracias a la fuerza centrífuga del ventilador centrífugo turboalimentado. No es necesario repetir la limpieza en la misma área, lo que permite una limpieza sin consumo de agua, protección del medio ambiente y ahorro de energía.



-

Teléfono
-

Correo electrónico
-

WhatsApp
-

Arriba